Artus Lite
Artus Lite
OVERVIEW
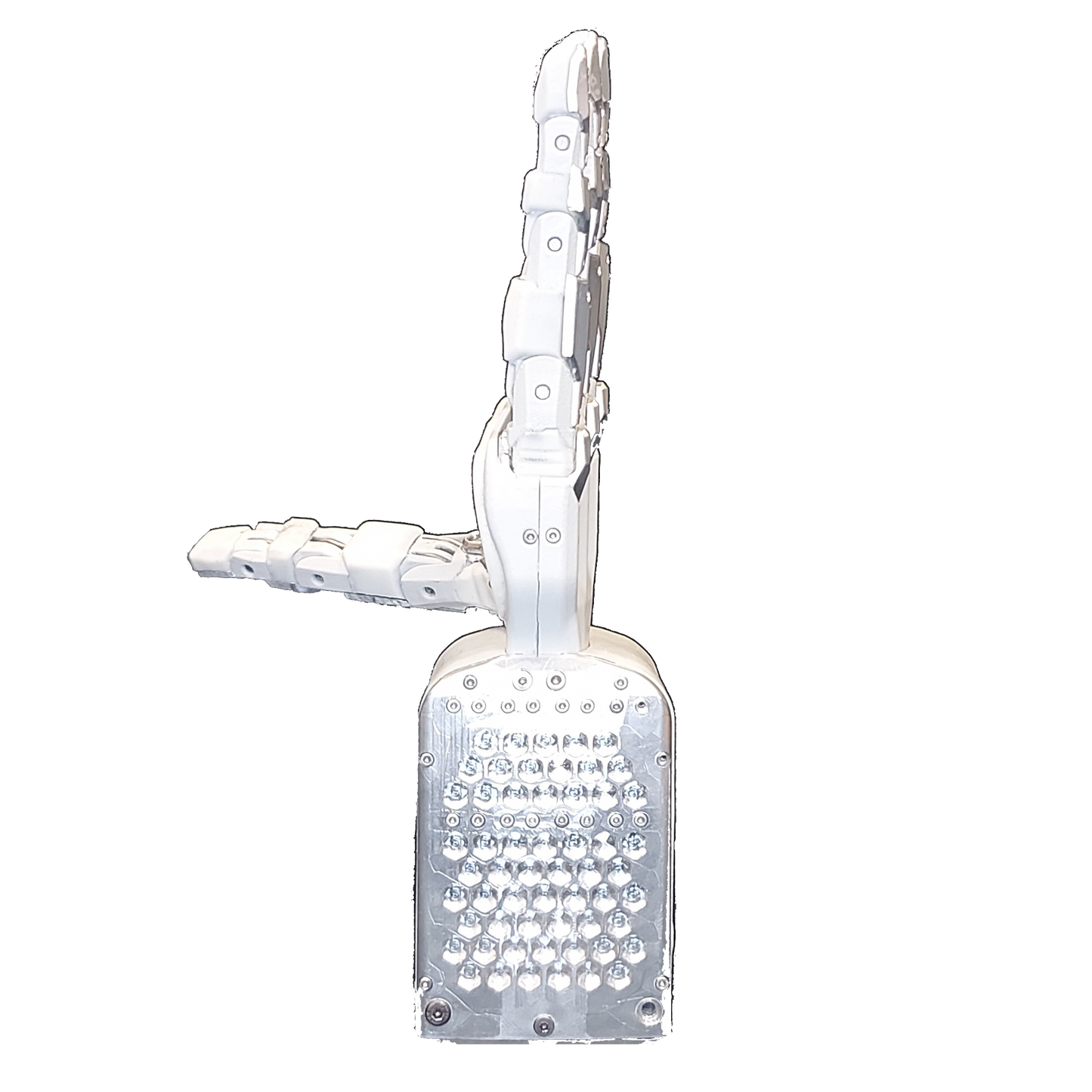
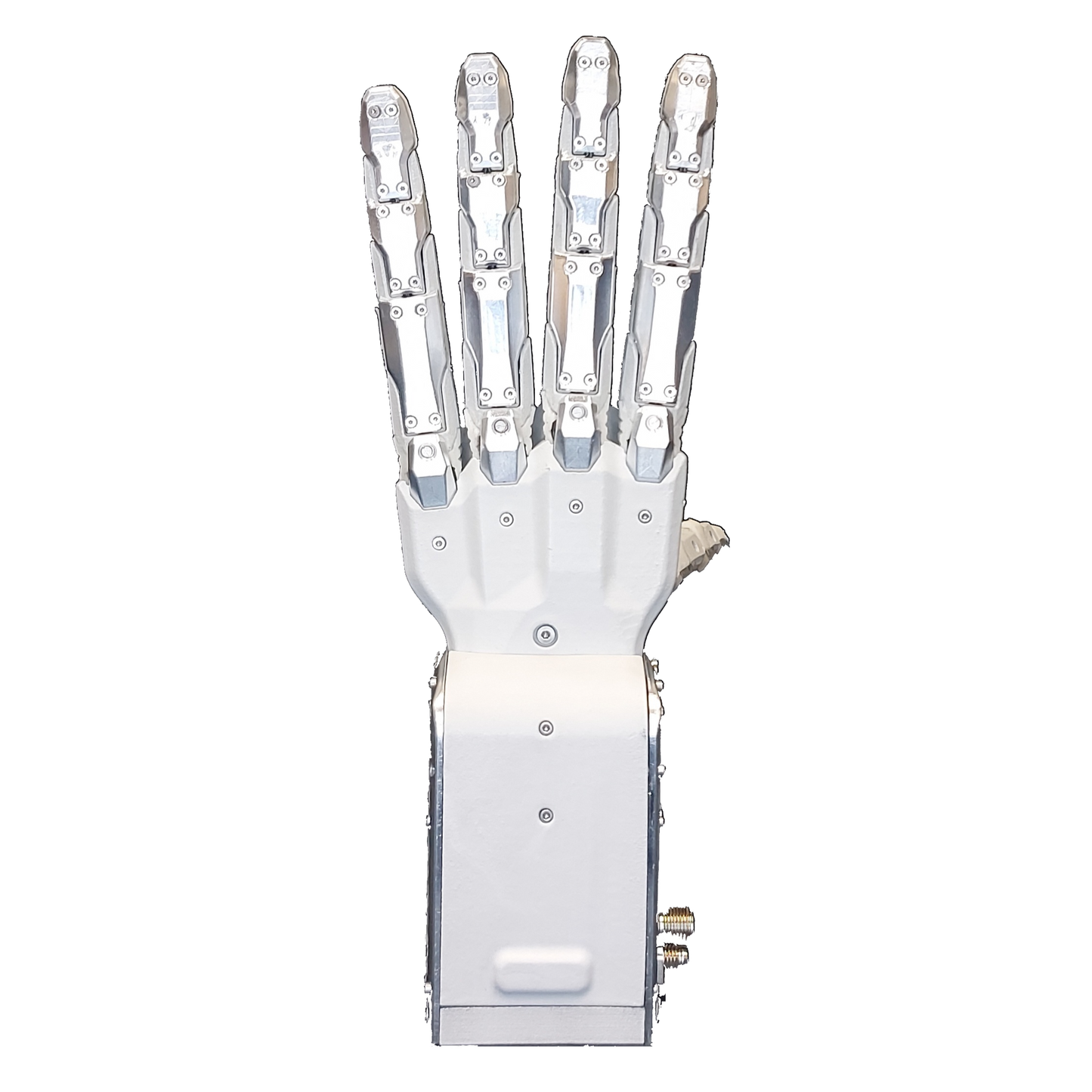
This agnostic universal end-effector was built to automate complex industrial tasks not possible with conventional grippers. This compact, lightweight, high dexterity, robotic hand replicates human functionality, allowing the automation of tasks in dynamic environments.
All robotic hand models developed by Sarcomere will be compatible with each other. Our customers can start to develop AI, ML, and kinematic models with the 3D Hand now; once the newer and more advanced hands are released, the data sets can be transferred to the new model for seamless operations.
FEATURES
- Designed for indoor industrial operations to automate menial labour
- Rugged construction to withstand high force grips and impact
- Internal sensing of finger joint positioning and force application
- Compatible with all systems
- Connector Interface: ISO 9409-1-50-4-M6, Canbus, Serial, WiFi
TECHNICAL SPECIFICATIONS
|
Joints |
20 articulated joints (4 per finger and 1 thumb) |
|
Degrees of Freedom |
20 (16 actuated and 4 under actuated DoF) |
|
Weight |
1.4 kg |
|
Speed - Open/Close |
1 Hz |
|
Strength - force at fingertips |
1.5 kg |
|
Max Payload Capacity |
5 kg (contact us for larger payloads up to 20 kg) |
|
Materials |
Carbon Fiber, Aluminum and Silicone |
|
Power Supply |
24 volts DC (200 W) |